Hard-Wired Devices: Overview of Operation + Logging Parameters

Written by Matthew Clark-Massera
Updated at March 10th, 2026
Table of Contents
Applies to:
| Device | Firmware Version |
| Arrow Global BLE | All Versions |
| Bolt2-4G | All Versions |
| Dart3-2G, Dart3-4G, Dart3-4G-BLE, Dart3-Global-BLE | All Versions |
| G120-2G and G120-4G | All Versions |
| G150-Global | All Versions. See additional configurations for v1.5+ |
| G70-2G, G70-4G, G70-4G-BLE | All Versions |
Trip Tracking Modes
Our devices revolve around the concept of a 'Trip' for tracking. There are multiple ways in which hard-wired devices can detect the beginning and end of trips
- Wired Ignition (not available on Bolt2)
- GPS Movement Based (Emulated Ignition)
-
Run Detect
Defaults
- Bolt2: The Bolt2 is configured for GPS Movement Based Trips only by default (as it has no ignition input)
- Other devices: Configured for Wired ignition and Movement Trips by default. So this means if there is no physical ignition connected (or active), trips are still tracked. A trip is entered if the device is towed
Wired Ignition
In general, this is the most reliable way to detect trips accurately in most vehicles, and it also allows for additional data to be captured such as engine idle. If it is possible, it is recommended to wire in the ignition.
Parameters:

The device will upload on the beginning of a trip, and turn on the GPS and Cellular modem. It will remain on and upload according to the Logging Parameters.
GPS Movement Trips (Emulated Ignition):
This mode works in a similar way to "Standard GPS Tracking" on our battery powered devices.
- The device waits in a low-power sleep state for accelerometer activity.
- Once woken, it checks the GPS for movement over a period of a few seconds.
- If the GPS shows movement over the start threshold, a trip is started, and the the ignition bit (DI 0) is set to Active.
- If this is not the case, the device then resumes sleeping, with both the GPS and mobile data off.
- Once the asset has been stationary for some time, or the GPS signal has been lost for some time, the trip is ended, and a final upload is performed.
This means that trips where an asset is towed (and the engine is not run) trips can be detected. Additionally, trips can be detected at times when we do not wire in the ignition line (i.e. when using a cigarette lighter harness)
We refer to this feature as 'Emulated Ignition' as by default a movement trip 'emulates' a physical ignition source - meaning the device will treat them in the same way - setting the ignition bit DI 0.
Details
Movement trip start behaviour is controlled by these parameters:
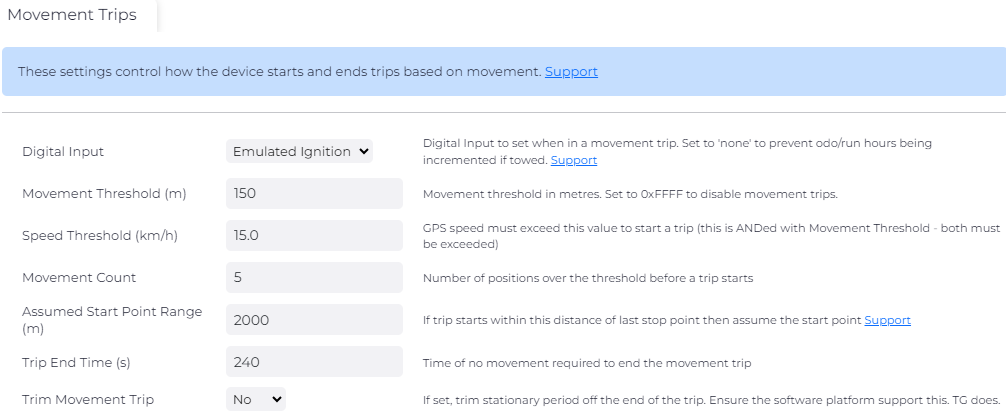
To begin a trip, the movement and speed thresholds are ANDed together. i.e. we must be over 150m from the start point AND travelling over 15km/h to begin a trip with the above parameters. So very slow-moving assets ideally should have physical ignition hard wired, or be sure to drop the speed threshold.
>>Once woken, it checks the GPS for movement over a period of a few seconds.
In detail, this means that after some accelerometer activity is detected, the device keeps checking for movement until there has been no accelerometer activity for 36 seconds (hardcoded), and no GPS movement for the Trip End Time (configurable).
The "Movement Count" means that we require this many fixes (the device gets a fix second by second) that all agree that the device is over the trip start movement and speed thresholds to begin a trip. Higher values mean the device is more 'sure' that it is on the move, and there is less chance that a single erroneous fix will result in a false trip start.
Mounting Hard-Wired Devices
Helpjuice Info Callout Body
Run Detect
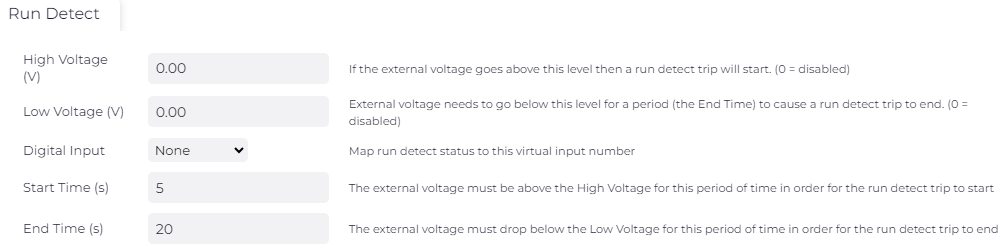
Run Detect will put the device into trip based on changes in the external voltage.
The assumption is that when the engine is turned on, the vehicle battery voltage will increase as the alternator is turned on to charge the battery. In many cases this will work well if a wired ignition is not available. However, this assumption does not always hold true. The resting/running battery voltage of a vehicle can change over time, so the thresholds below may need to be adjusted. Modern vehicles are also smart enough to turn off the alternator when the battery is fully charged, and some even will turn off the engine when stopped at traffic lights. For this reason run detect is not foolproof.
-
High Voltage: Set this number to be below the average voltage output when the engine is ON so the Run Detect is activated when the engine voltage crosses the value
-
Low Voltage: Set this number to be lower than the High Voltage value but higher than the average value when the engine is OFF so Run detect is deactivated when the voltage crosses the value.
-
Digital Input: To have Run Detect activate trip status, set the Digital Input to Ignition (0).
-
Start Time (s): Amount of time for voltage to register over High Voltage, i.e, engine to be running, before trip starts
- End Time (s): Amount of time after engine stops, i.e, voltage to cross Low Voltage for trip to end.
Default Tracking Parameters
Hard Wired Device Default logging parameters are:
- Stationary - Hourly Heartbeats
- The device will log a heartbeat record, connect to the server and refreshes its GPS data every 60 minutes.
- The device will log a heartbeat record, connect to the server and refreshes its GPS data every 60 minutes.
- Trip Tracking - Wired and Emulated ignition - The device will start a trip if either the
- Ignition wire is pulled high, i.e, over 2.2v is applied to the ignition wire, or
- Movement is detected, ie, a trip is started if >150m of movement from the initial position
- Logging - When the device is in trip, it will turn on it's GPS module and cellular modem and log records based on:
- Time interval
- log a record every 60 seconds or;
- Distance interval
- when 500m is travelled or;
- Heading Change
- when direction is changed by 60° over a short distance (<250m) or;
- when direction is changed by 20° over a long distance (>250m)
- Time interval
The logging intervals are configurable from the logging parameters tab in OEM.
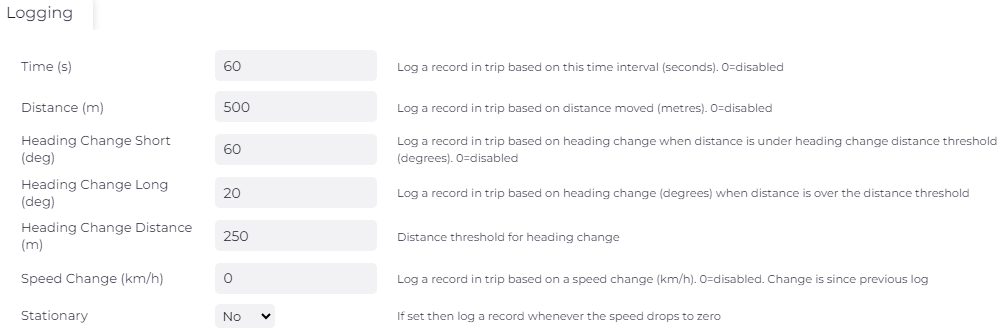
Speed change and stationary are disabled by default.
- Speed Change (km/h) - Log a distance when the change in speed crosses this threshold +/-. This is useful for speed monitoring.
- Stationary - Log a specific record immediately when the speed drops to 0. This is useful for idle monitoring.
The heading change log means that the trips plotted by the device can follow the true path of the road, without clipping corners.
Other Default Logging/Upload Behaviour
By default, uploads also occur for:
Transporting Assets?
As covered above, GPS Movement Trips is enabled by default on all powered devices. This means that the device can go in trip based on GPS Movement when the asset is being transported or towed, and increment the Odometer and Run hour values. This can be prevented by disabling Movement Trips for the asset.
Details and parameter setup is detailed here: Transported Trips - Prevent towing incrementing Run hours and Odometer