Boat Tracking with Battery Powered Devices

Written by Matthew Clark-Massera
Updated at March 4th, 2025
Table of Contents
All DM devices revolve around the concept of "trip". For battery powered devices, trip detection works in one of two modes:
- GPS Movement Based Trip Detection.
If some small movement occurs, the device is woken up by accelerometer activity. It then periodically checks GPS for movement. If the device has moved more than the trip start threshold (250m default) from the start point (default), it goes into trip. The trip ends once no GPS movement has been seen for the trip end timeout (5 min default) - Jostle (Accelerometer Based) tracking.
Once a few seconds of accelerometer activity has been seen, start a trip. End it after the trip end timeout of no accelerometer activity (5 min default).
This mode is not suitable for a marine application where the accelerometer is going off all the time - we'll always be in trip!
More detail can be found here: Battery Powered Device Parameters
There is the option to also set the device into 'Periodic' mode - where it does not record trips, and simply updates on a timed basis - i.e. every 6 hours.
What if the asset you need to track is a boat?
The above tracking options work quite well for land-based assets, as vibration is minimal, or non existent when the assets are not in use. So for tracking mode (1) - the GPS is not frequently checked.
Conditions are not similar while an asset is in water. Continuous disturbance in the water, maybe due to waves or passing boats will wake up the accelerometer quite frequently. This will mean that a device in its default setting, tracking and asset in water can drain the battery faster that tracking an asset in land, or result in the device being in trip constantly.
Parameter Adjustments:
We can make some adjustments to help avoid excessive battery drain. The below applies when we are configured for GPS Based trip detection. Defaults are shown

The way these parameters work in conjunction with the described trip start behavior is as follows:
- Accelerometer goes off (due to some jostling, a wave) and wakes the device
- The device sleeps for 30 seconds (wakeup delay)
- It then checks GPS to see if it has moved past the threshold. If it hasn't, no trip has started, so it goes back to sleep
- If the accelerometer goes off again, the same happens. If this happens 7 times without a trip starting, the device sleeps for 5 minutes before doing a GPS check again.
So we can make the following adjustments to avoid 'nuisance' wakeups.
- Increase wakeup delay - say to 60 or 120s - if the asset is moving very slowly (say a mooring slowly drifting off) - increasing this value will have little input - since we're unlikely to cross the trip start threshold in 30s anyway.
- Reduce No Movement Limit - stop bothering to check GPS earlier. Try 2 or 3
- Increase No Movement Sleep Time. Adjusting these 2 parameters might result in delayed trip starts when the asset actually moves. Try 600s
The values will be slightly different based on the application. Adjust and test your results.
Checking Results
We can see if the parameter changes have had the intended effect by looking at the device statistics available from the device details page in OEM. We can compare the number of times the accelerometer has woken up the unit to the number of trips the device has made.
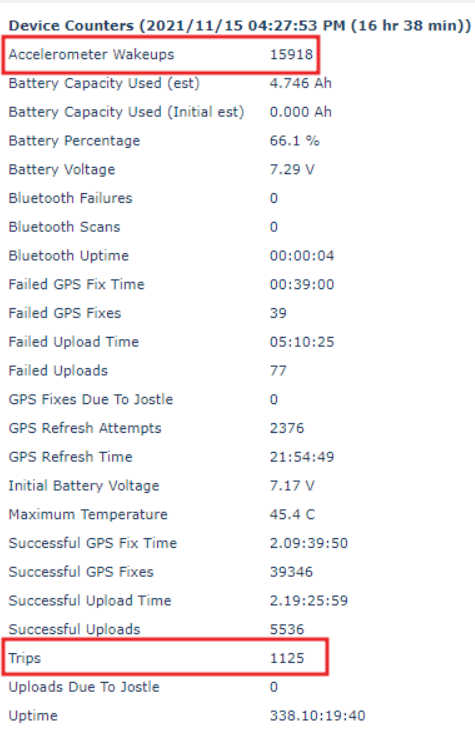
If we compare the stats above, the device has done a trip around every 14 accelerometer wakeups (15918 : 1125)
A ratio of about 10:1 is typical for a land based asset, it is going to be higher on water. But shoot for 30:1 or 20:1.
Periodic Tracking Mode
Adjusting the parameters above can help reduce the additional battery drain. It does not get us around the fact that the accelerometer will be going off near-constantly. Even GPS-based tracking modes make use of the accelerometer to determine when to check GPS. So trip based tracking is not as useful in this application.
There are scenarios where it makes sense to simply just configure periodic tracking only (i.e. hourly updates)